Note
Click here to download the full example code
Neural Style Transfer with pystiche¶
This example showcases how a basic Neural Style Transfer (NST), i.e. image
optimization, could be performed with pystiche.
Note
This is an example how to implement an NST and not a tutorial on how NST works. As such, it will not explain why a specific choice was made or how a component works. If you have never worked with NST before, we strongly suggest you to read the Gist first.
Setup¶
We start this example by importing everything we need and setting the device we will be working on.
23 import pystiche
24 from pystiche import demo, enc, loss, optim
25 from pystiche.image import show_image
26 from pystiche.misc import get_device, get_input_image
27
28 print(f"I'm working with pystiche=={pystiche.__version__}")
29
30 device = get_device()
31 print(f"I'm working with {device}")
Out:
I'm working with pystiche==1.0.1
I'm working with cuda
Multi-layer Encoder¶
The content_loss and the style_loss operate on the encodings of an image
rather than on the image itself. These encodings are generated by a pretrained
encoder. Since we will be using encodings from multiple layers we load a
multi-layer encoder. In this example we use the vgg19_multi_layer_encoder that is
based on the VGG19 architecture introduced by Simonyan and Zisserman
[SZ14] .
44 multi_layer_encoder = enc.vgg19_multi_layer_encoder()
45 print(multi_layer_encoder)
Out:
VGGMultiLayerEncoder(
arch=vgg19, framework=torch
(preprocessing): TorchPreprocessing(
(0): Normalize(mean=('0.485', '0.456', '0.406'), std=('0.229', '0.224', '0.225'))
)
(conv1_1): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu1_1): ReLU()
(conv1_2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu1_2): ReLU()
(pool1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv2_1): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu2_1): ReLU()
(conv2_2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu2_2): ReLU()
(pool2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv3_1): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu3_1): ReLU()
(conv3_2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu3_2): ReLU()
(conv3_3): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu3_3): ReLU()
(conv3_4): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu3_4): ReLU()
(pool3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv4_1): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu4_1): ReLU()
(conv4_2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu4_2): ReLU()
(conv4_3): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu4_3): ReLU()
(conv4_4): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu4_4): ReLU()
(pool4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv5_1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu5_1): ReLU()
(conv5_2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu5_2): ReLU()
(conv5_3): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu5_3): ReLU()
(conv5_4): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu5_4): ReLU()
(pool5): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
Perceptual Loss¶
The core components of every NST are the content_loss and the style_loss.
Combined they make up the perceptual loss, i.e. the optimization criterion. In this
example we use the feature_reconstruction_loss introduced by Mahendran and
Vedaldi [MV15] as content_loss.
We first extract the content_encoder that generates encodings from the
content_layer. Together with the content_weight we initialize a
FeatureReconstructionOperator serving as content
loss.
62 content_layer = "relu4_2"
63 content_encoder = multi_layer_encoder.extract_encoder(content_layer)
64 content_weight = 1e0
65 content_loss = loss.FeatureReconstructionLoss(
66 content_encoder, score_weight=content_weight
67 )
68 print(content_loss)
Out:
FeatureReconstructionLoss(
(encoder): VGGMultiLayerEncoder(layer=relu4_2, arch=vgg19, framework=torch)
)
We use the gram_loss introduced by Gatys, Ecker, and Bethge [GEB16] as
style_loss. Unlike before we use multiple style_layers. The individual
GramOperator s can be conveniently bundled in a
MultiLayerEncodingOperator.
77 style_layers = ("relu1_1", "relu2_1", "relu3_1", "relu4_1", "relu5_1")
78 style_weight = 1e3
79
80
81 def get_style_op(encoder, layer_weight):
82 return loss.GramLoss(encoder, score_weight=layer_weight)
83
84
85 style_loss = loss.MultiLayerEncodingLoss(
86 multi_layer_encoder, style_layers, get_style_op, score_weight=style_weight,
87 )
88 print(style_loss)
Out:
MultiLayerEncodingLoss(
encoder=VGGMultiLayerEncoder(arch=vgg19, framework=torch), score_weight=1000
(relu1_1): GramLoss(score_weight=0.2)
(relu2_1): GramLoss(score_weight=0.2)
(relu3_1): GramLoss(score_weight=0.2)
(relu4_1): GramLoss(score_weight=0.2)
(relu5_1): GramLoss(score_weight=0.2)
)
We combine the content_loss and style_loss into a joined
PerceptualLoss, which will serve as optimization criterion.
95 perceptual_loss = loss.PerceptualLoss(content_loss, style_loss).to(device)
96 print(perceptual_loss)
Out:
PerceptualLoss(
(content_loss): FeatureReconstructionLoss(
(encoder): VGGMultiLayerEncoder(layer=relu4_2, arch=vgg19, framework=torch)
)
(style_loss): MultiLayerEncodingLoss(
encoder=VGGMultiLayerEncoder(arch=vgg19, framework=torch), score_weight=1000
(relu1_1): GramLoss(score_weight=0.2)
(relu2_1): GramLoss(score_weight=0.2)
(relu3_1): GramLoss(score_weight=0.2)
(relu4_1): GramLoss(score_weight=0.2)
(relu5_1): GramLoss(score_weight=0.2)
)
)
Images¶
We now load and show the images that will be used in the NST. The images will be
resized to size=500 pixels.
106 images = demo.images()
107 images.download()
108 size = 500
Note
ìmages.download() downloads all demo images upfront. If you only want to
download the images for this example remove this line. They will be downloaded at
runtime instead.
Note
If you want to work with other images you can load them with
read_image():
from pystiche.image import read_image
my_image = read_image("my_image.jpg", size=size, device=device)
132 content_image = images["bird1"].read(size=size, device=device)
133 show_image(content_image, title="Content image")
138 style_image = images["paint"].read(size=size, device=device)
139 show_image(style_image, title="Style image")

Neural Style Transfer¶
After loading the images they need to be set as targets for the optimization
criterion.
149 perceptual_loss.set_content_image(content_image)
150 perceptual_loss.set_style_image(style_image)
As a last preliminary step we create the input image. We start from the
content_image since this way the NST converges quickly.
Note
If you want to start from a white noise image instead use
starting_point = "random" instead:
starting_point = "random"
input_image = get_input_image(starting_point, content_image=content_image)
167 starting_point = "content"
168 input_image = get_input_image(starting_point, content_image=content_image)
169 show_image(input_image, title="Input image")

Finally we run the NST with the image_optimization() for
num_steps=500 steps.
In every step the perceptual_loss is calculated nd propagated backward to the
pixels of the input_image. If get_optimizer is not specified, as is the case
here, the default_image_optimizer(), i.e.
LBFGS is used.
181 output_image = optim.image_optimization(input_image, perceptual_loss, num_steps=500)
Out:
Image optimization: 100%|██████████| 500/500 [01:27<00:00, 5.69it/s, loss=1.078e+01]
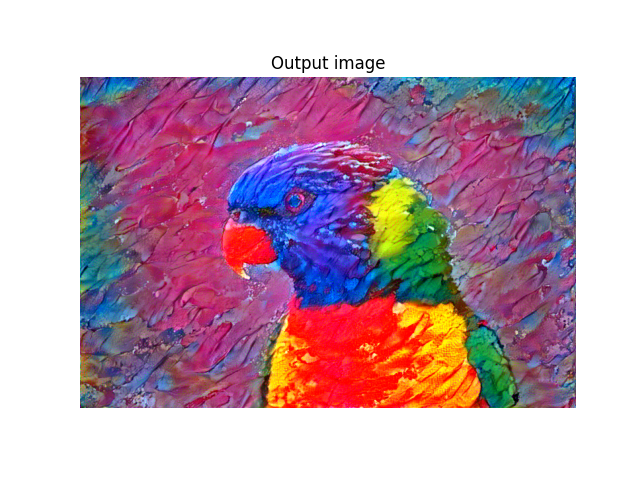
After the NST is complete we show the result.
187 show_image(output_image, title="Output image")
Conclusion¶
If you started with the basic NST example without pystiche this example hopefully
convinced you that pystiche is a helpful tool. But this was just the beginning:
to unleash its full potential head over to the more advanced examples.
Total running time of the script: ( 1 minutes 28.923 seconds)
Estimated memory usage: 2300 MB